01 A Cooperative Map Matching Algorithm Applied in Intelligent and Connected Vehicle Positioning
02 Indoor Sign-based Visual Localization Method
03 Intelligent Vehicles Localization Based on Semantic Map Representation from 3D Point Clouds
04 Companion Relationship Discovering Algorithm for Passengers in the Cruise Based on UWB Positioning
05 An Overview of Traffic Management in "Automatic+Manual" Driving Environment
06 An Image Generation Method for Automated Driving Based on Improved GAN
07 An Analysis of Injury Severities in School Bus Accidents Based on Random Parameter Logit Models
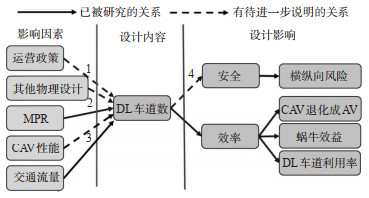
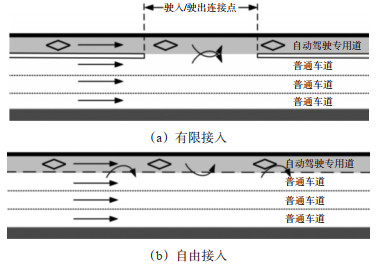
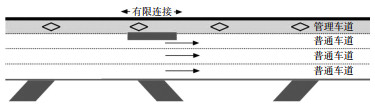
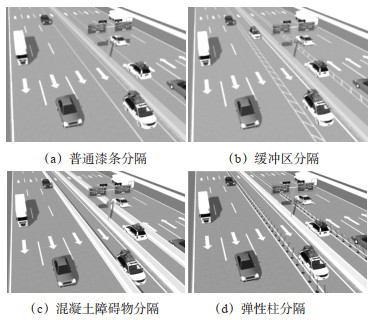
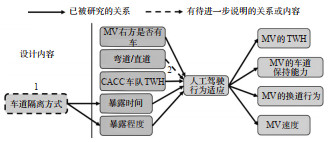
To thoroughly explore the impacts of the physical infrastructure design of dedicated lanes (DL) for Connected and autonomous vehicle (CAV) on traffic performances, this paper systematically sorted out the ongoing progress in three domains, namely, DL deployment conditions, DL access types, and separation types between DL and general-purpose lanes. It clarifies the theoretical foundations and practical advancements of existing research, constructing a framework that outlines the relationship between physical infrastructure and traffic system performance, and such endeavor has shed light on the research gaps and future direction in this regard. The results indicate that current studies on DL deployment conditions primarily focus on traffic efficiency, while assessments of traffic safety are relatively lacking. Divergent conclusions in existing research stem from different assumptions, thus demanding more precise evaluations of DL deployment conditions in future research. Concerning the access types, both limited access and continuous access have their advantages, yet the embodiment conditions of such advantages require further validation. The design of high occupancy vehicle (HOV) lane access types can also be used for re-evaluation in the scenario of DL. It is essential to ascertain how the separation methods between DL and regular lanes affect the adaptability of human drivers, ensuring their effective adjustment to DL deployment. In general, although some progress has been made in current research, the lack of real-world cases and actual deployment effect verification means that simulation-based methods often yield varying conclusions due to differences in assumptions and other factors. Future research should focus on accurately describing CAV behavior, conducting longitudinal and cross-sectional comparison studies, and quantifying the impact of DL design on safety and efficiency to make improvements.

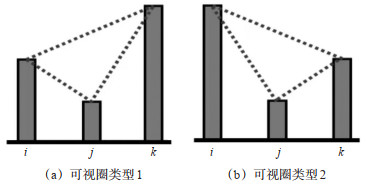
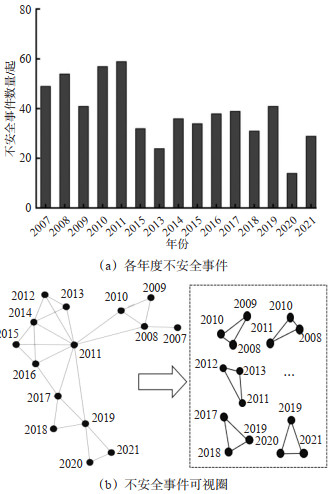
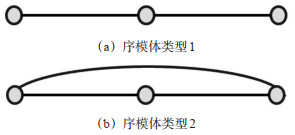
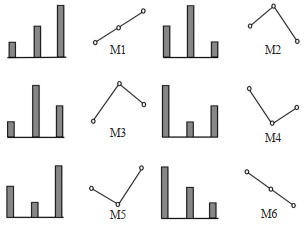
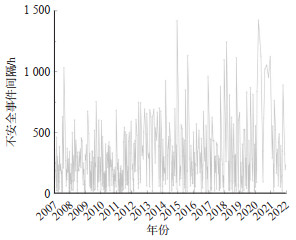
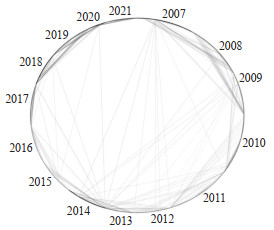
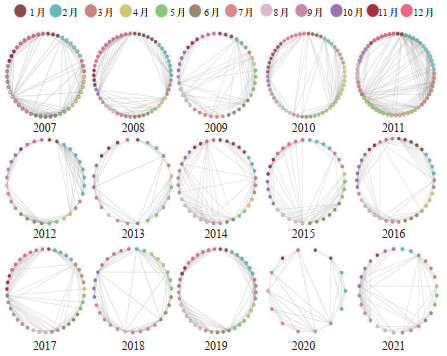
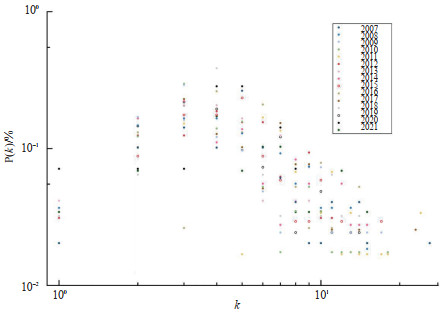
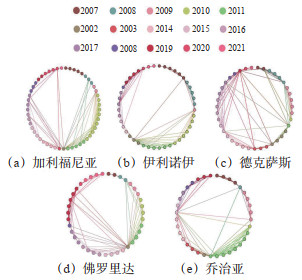
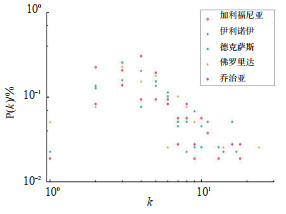
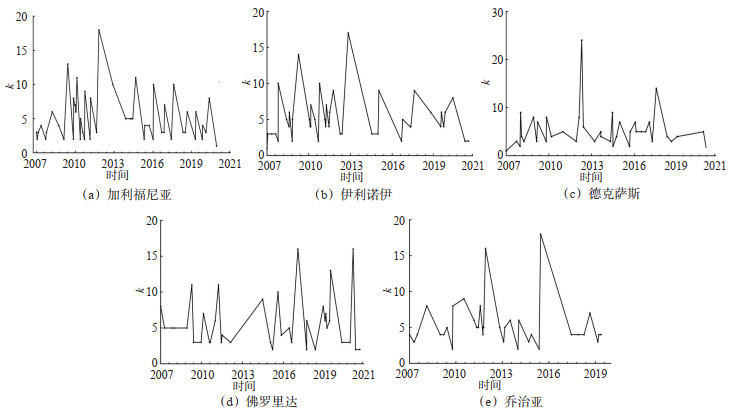
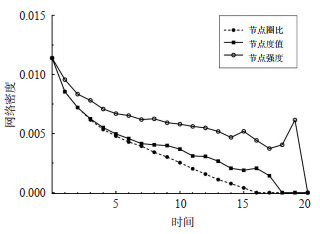
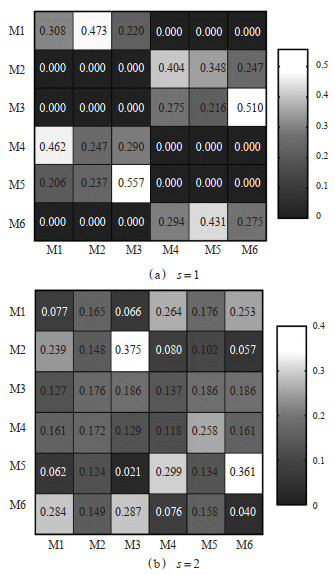
Time series characteristics of traffic accidents is crucial for understanding air traffic safety. To analyze the characteristics of air-traffic-accident time series, a visual graph (VG) method is proposed. The unsafe-event time series (UETS) are mapped into complex network via the VG, and then the static characteristics of the UETS are described by the topological indicators such as degree distribution and clustering coefficient. Considering the higher-order influences and interaction modes between events, a visual circle ratio index is developed to evaluate the impacts of each event on the entire safety level. A third-order temporal structure representing temporal evolution is proposed based on the sequential model from the VG, describing the dynamic micro- characteristics of the UETS. To demonstrate the proposed method, an empirical analysis is conducted based on 578 unsafe air traffic events that occurred in the United States from 2007 to 2021, and the results indicate that: ① the VG of the UETS exhibit a long-tail degree distribution at both macroscopic and microscopic scales, with clustering coefficients all greater than 0.7; ② the VG network of the UETS possesses small-world characteristics, and the macroscopic sequence-degree distribution follows the power-law distribution with a coefficient of 1.852, indicating scale-free properties of the network; ③ the visibility graphs of different regions also exhibit the characteristics of small-world networks, with significant differences in network size and density among regions, revealing the spatial heterogeneity in the frequency of unsafe events. The visual circle index of the network reaches 33.2%, the circle ratio structural indicator has a significant impact on network robustness, demonstrating that the circle ratio index can be used to identify the effects of different events on the overall safety level. ④ the third-order temporal structure shows significant transition characteristics when the step size is 1 and 2. In summary, this paper reveals that the occurrence of unsafe air traffic events has complex pattern that differs from randomness and periodicity patterns, The safety levels among different regions exhibit spatial heterogeneity and temporal evolution characteristics. Considering the impact of higher-order network structures, managing a minority of nodes with high circle ratios can enhance the overall safety level from a macro perspective. Analyzing the transfer patterns and trend preferences of temporal structures can reveal the intrinsic laws of how air traffic unsafe events evolve over time from a micro perspective. This is conducive to predicting potential risk points, thereby providing a scientific basis for formulating effective preventive measures and safety management decisions.

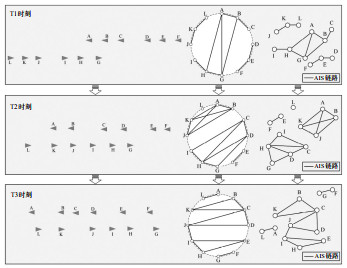
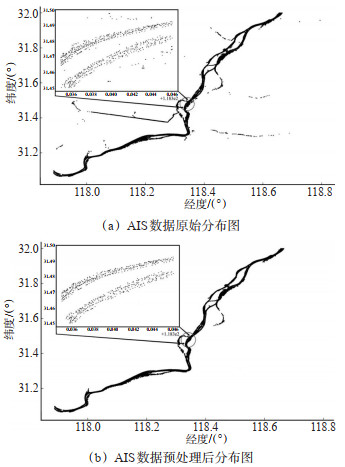
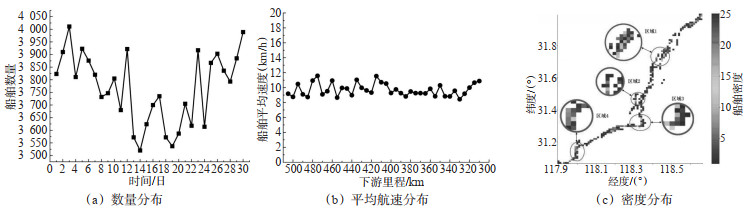
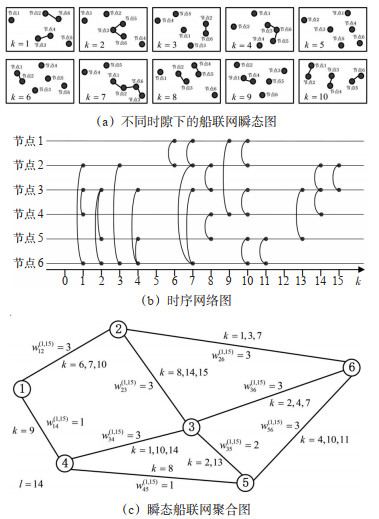
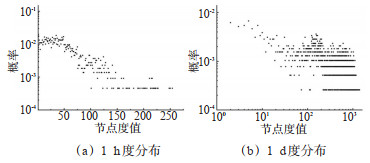
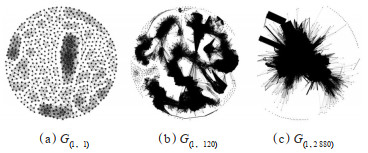
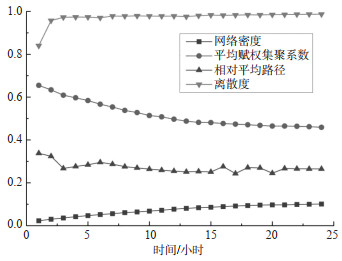
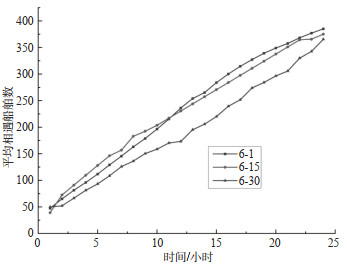
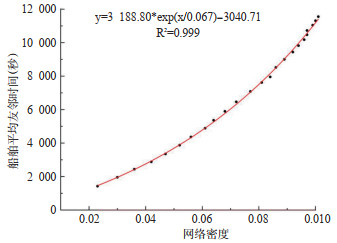
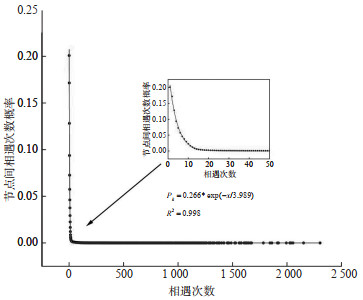
This paper empirically studies the opportunistic proximity among inland vessels. A social network analysis (SNA) method considering time-series characteristics is proposed based on the original SNA method, which transforms the network clustering with a large-scale time span into that with a small-scale span and could be used to analyze the dynamic behaviors of inland vessels in limited waters; additionally, considering the temporal characteristics of the proximity relationships among vessels, the complex network theory is employed to model the vessel social network (VSN), which explains the fact that many encountering ships are acquainted with each other in inland region. The AIS data from a 200-kilometer section of the lower Yangtze River in one month are used for demonstration. The results show that: ① the degree distribution of the VSN can be fitted with a Gaussian distribution with a fitting degree of over 96%; ② with the increase of time scale, small-world characteristics and scale-free features of the VSN become apparent, clusters sub-networks consisting of stationary vessels and sailing vessels are observed in the spatial dimension, the density of the VSN slowly increase to 0.1, the average path remains 0.2-0.3, the average weighted clustering coefficient slowly decreases and converges to 0.4-0.5, the dispersion rapidly approaches 1, and overall connectivity is achieved; ③ the average speed of the ships who have high degrees in the VSN with different time spans are highly correlated; ④ with the increase of vessel density, the average neighborhood time in 1 day grows exponentially and the repeated encounters fit a negative exponential distribution. In summary, the establishment or disconnection of data exchange relationships among sailing ships is determined by the ephemeral characteristics of the proximity relationships between vessels in physical space; the interaction behaviors of inland vessels have a memory effect on the interaction behaviors in the future, providing new insights for the research of inland traffic safety.


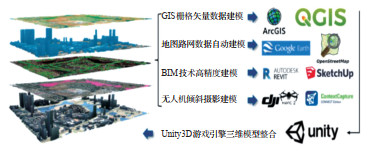
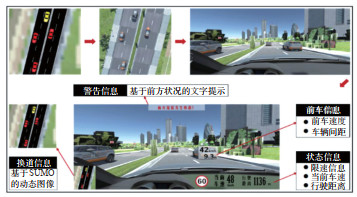
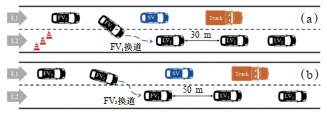
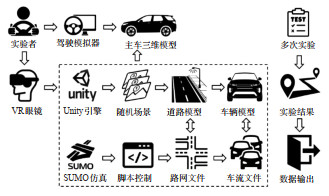
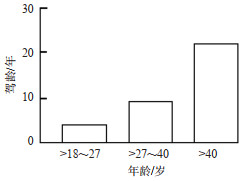
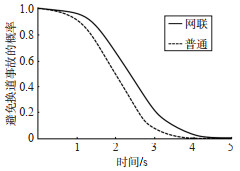
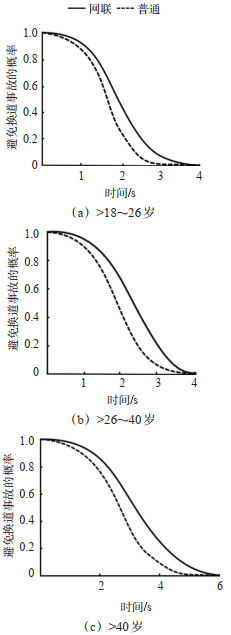
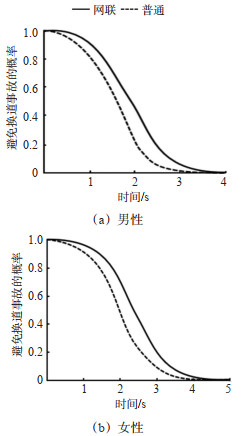
Traditional driving simulators need help to accurately simulate complex interactions, such as speed variations and lane changes in connected vehicle environments. The connected virtual reality (VR) driving simulator can more realistically replicate vehicle physical characteristics, traffic flow dynamics, and actual road environments using advanced sensors and real-time data processing. A driving simulation system for free lane-changing experiments is developed using traffic simulation and 3D modeling technologies, based on which a scenario library is established and further carry out experiments about free lane-changing behavior. Generalized estimating equations is adopted to establish models of gap selection and lane-changing time. An accelerated failure time model is adopted to analyze the safety impact of the connected environment on free lane-changing behavior. The results can be concluded in two aspects. In connected environments: ① Female drivers exhibit longer lane-changing gaps and need more time. Younger drivers show shorter gaps and need less time. ②An increase of 1 m/s2 in acceleration noise can reduce collision risk by 28% during lane changes, and a 1 m increase in lane-changing gap can increase collision risk by 1.1%.③Older drivers have a higher level of lane-changing safety. Middle-aged and elderly drivers (> 40 years old) show 38.3% and 64.3% higher regarding time-to-collision (TTC) than young (> 27~40 years old) and younger drivers (> 18~27 years old) do. ④Female drivers have a higher level of lane-changing safety than male drivers do, with a 20.1% higher of TTC during free lane-changes. Compared to non-connected environments: ①Drivers in connected environments show a 1.16 m increase in lane-changing gap, a 2.41 s increase in lane-changing time and a 19.72% improvement in the level of safety. ②The probability of occurring lane-changing accidents decreases with the increase of collision risk durations. Specifically, it reduces by 5.8%, 17.2%, 14.4%, and 3.0% at 1, 2, 3, and 4 s of collision risk duration, respectively. These probabilities vary significantly across drivers'genders and ages.


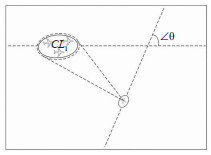
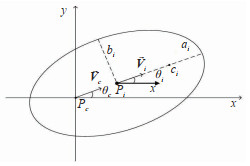
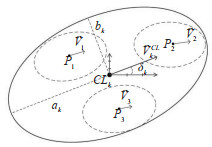
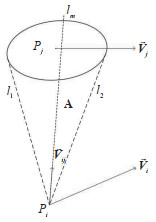
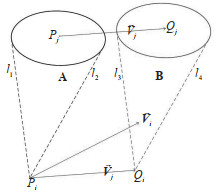
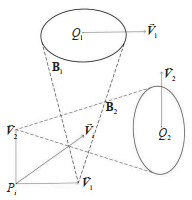
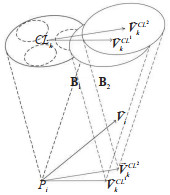
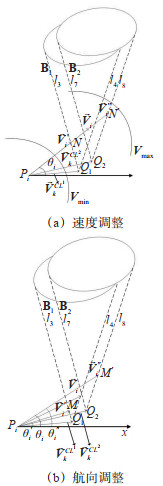
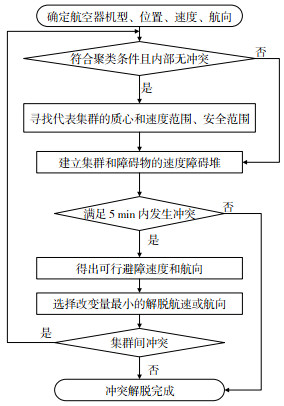
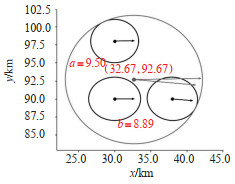
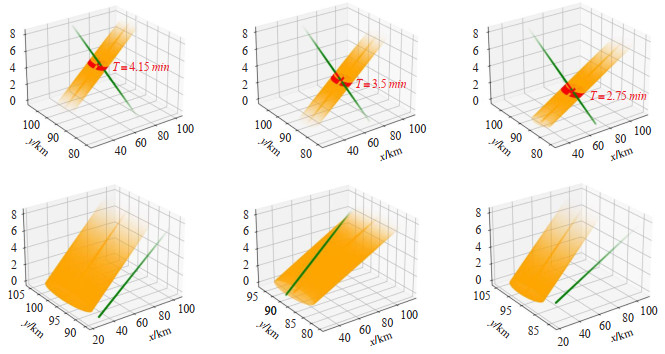
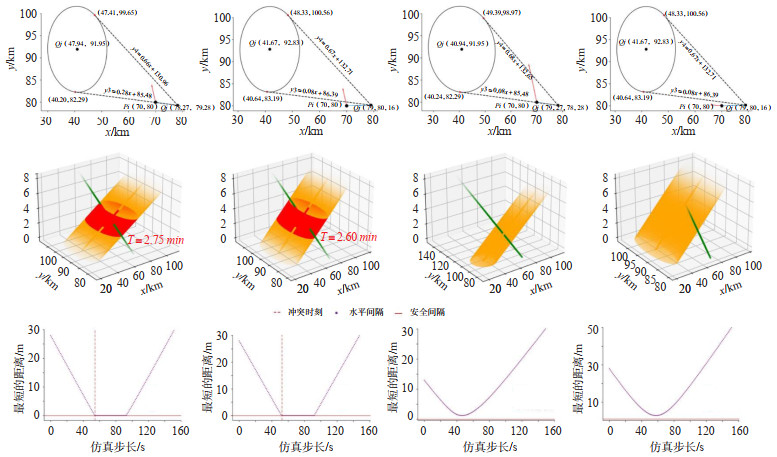
The thesis explores aircraft swarming in dense airspace. A multi-scale protected zone model, coupled with an improved velocity obstacle method, is proposed to solve this. Traditional approaches often rely on a single-aircraft protected zone model, which utilizes a velocity obstacle method characterized by complex calculations and suboptimal real-time performance. In contrast, a more advanced approach is introduced, featuring a dynamic ellipsoidal protected zone model and a fusion protected zone model specifically designed for aircraft swarms. These models are crafted to accurately depict the aircraft's flight state and safety intervals. Moreover, the work pioneers the geometric transformation from a single-aircraft protected zone to a swarm-based protected zone. The innovative aircraft swarm protected zone model reduces the dimensional complexity while integrating critical features such as swarm safety intervals and motion characteristics. The paper further develops an improved velocity obstacle method that is grounded on the multi-scale protected zone model. This refined method incorporates a velocity obstacle boundary specifically tailored for aircraft swarms, effectively reducing the computational demands of the algorithm. The proposed models and algorithms successfully portray multiple aircraft as swarms. By establishing boundaries for real-time adjustments in speed and direction specifically for aircraft swarms, they significantly reduce computational complexity. This effectively implements conflict detection and resolution trajectories for aircraft swarms. A comparison of the proposed method with conventional approaches shows a significant improvement in the conflict determination mechanism for aircraft clusters, reducing algorithm computation time by 33%. Additionally, the proposed method leads to a decrease in adjustment amplitude by 60.45%, enhancing its overall performance. The method effectively enhances the efficiency of aircraft conflict detection and resolution under swarming phenomena.
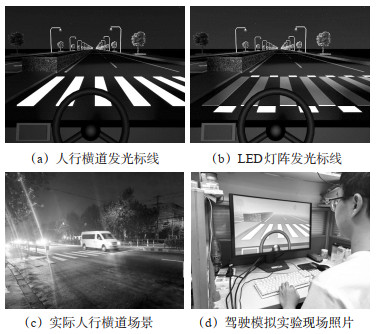
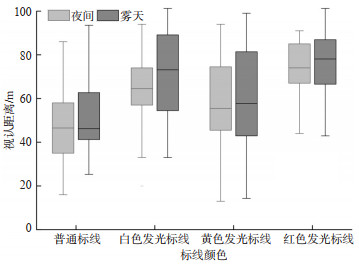
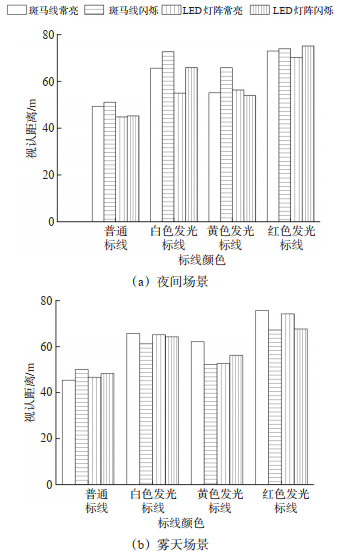
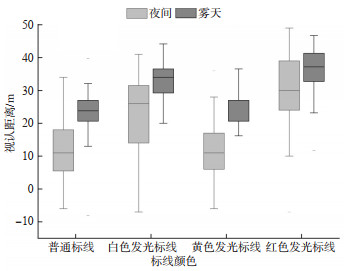
Frequent traffic accidents occur at urban pedestrian crossings during nighttime and foggy conditions due to low visibility. Insufficient visibility of traffic facilities and the lack of effective conflict warnings are significant factors. Driving simulation experiments are conducted to explore the effectiveness of new illuminating crosswalk markings compared to regular markings in enhancing drivers'visibility distance and providing traffic conflict warnings. These experiments are based on two low-visibility scenarios: nighttime and foggy conditions, designed using Cinema 4D software. Microscopic individual driving behavior data are collected. The Wilcoxon signed-rank test and Friedman rank sum test are used to deeply analyze the impact of luminescent color, luminescent mode, and luminescent position on drivers'visibility distance and longitudinal speed adjustment behavior. The results show that the drivers'visibility distance with illuminating crosswalk markings is significantly greater than with regular markings in low-visibility scenarios. In nighttime scenarios, the visibility distance with white, yellow, and red illuminating crosswalk markings increased by 36%, 21%, and 54%, respectively. In foggy scenarios, the visibility distance with white, yellow, and red illuminating crosswalk markings increased by 34%, 17%, and 47%, respectively. Besides, the deceleration magnitude of vehicles with white and red illuminating crosswalk markings is significantly greater than with regular markings in low-visibility environments, while the deceleration magnitude with yellow illuminating crosswalk markings is not significant. In nighttime scenarios, the deceleration magnitude of vehicles with white and red illuminating crosswalk markings increased by 101% and 150%, respectively, compared to regular markings. In foggy scenarios, the deceleration magnitude of vehicles with white and red illuminating crosswalk markings increased by 142% and 194%, respectively, compared to regular markings. Moreover, the light source, luminescent form, and color of the illuminating crosswalk markings have a significant interactive effect on drivers' visibility distance. Different combinations of marking attributes significantly impact drivers'visibility distance.
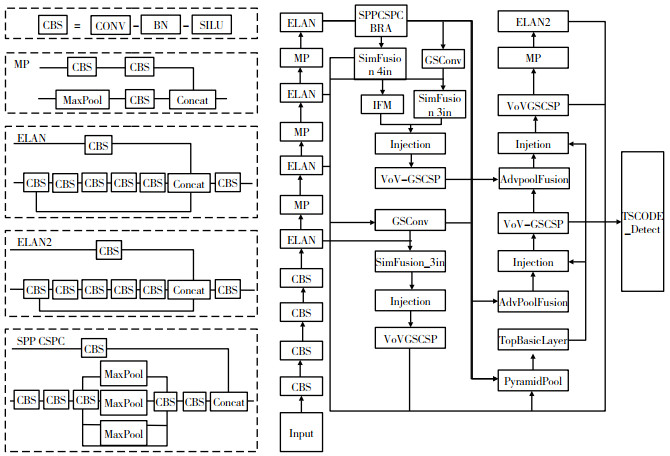
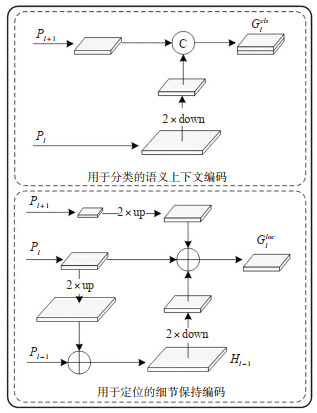
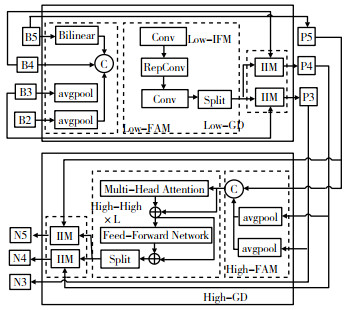
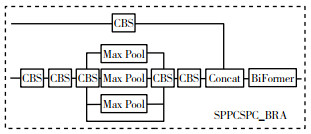
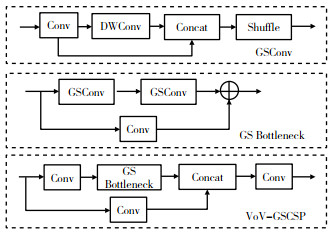
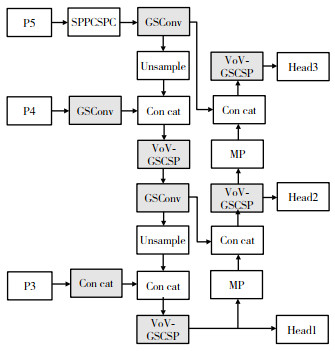
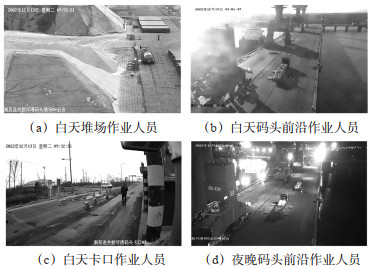
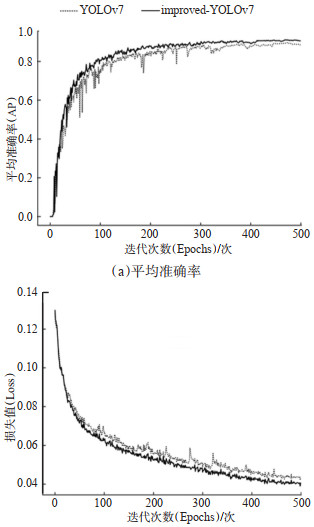
Accurate detection of workers in wide-angle surveillance images is significant for intelligent surveillance in port terminals. However, the traditional YOLOv7 algorithm has limitations on the recognition of workers in wide-angle surveillance images, such as weak feature extraction ability, low detection accuracy, etc. To fill these gaps, an algorithm for terminal worker detection based on improved YOLOv7 is proposed. A task-specific context decoupling (TSCODE) structure balancing the classification and localization tasks is designed, and the gather-and-distribute mechanism (GD) improving the fusion of multi-scale features is applied, which improves the performance and robustness of multiscale features detection from various workers'images. To strengthen the feature extraction of small targets, the vision transformer with bi-level routing attention (BRA-ViT) is introduced into the end of the backbone network, capturing the position, direction, and cross-channel information of small objects. The slim-neck is used to lighten the neck of the network, refine the number of parameters, and reduce computational complexity, enhancing detection speed while maintaining detection accuracy. Fourthly, a loss function with minimum-point-distance-based intersection over union (MPDIoU) is used to calculate the prediction loss of the bounding box, reducing the rates of false negatives and false positives. To validate the proposed algorithm, wide-angle surveillance images in different areas of the port (quay, yard, chokepoint, and other locations) at different times (day and night) are collected and annotated in the dataset, and ablation and comparison experiments are implemented. The results show that the average detection precision (AP) and average detection speed of the proposed algorithm are 90.6% and 39 fps, respectively. Compared with Faster R-CNN, SSD, YOLOv3, YOLOv5, YOLOv7, and YOLOv8, AP of the proposed algorithm is improved by 13.8%, 15.8%, 8.5%, 5.2%, 2.7%, and 3.5%, respectively; FPS of the proposed algorithm is similar to the baseline YOLOv7 algorithm. In summary, the proposed algorithm has higher AP than existing algorithms with responsible detection speed, which is suitable for real-time safety and security surveillance in port terminals.


Journal of Transport Information and Safety
(Founded in 1983 bimonthly )
Former Name:Computer and Communications
Supervised by:Ministry of Education of P. R. CHINA
Sponsored by:Wuhan University of Technology
Network of Computer Application Information in Transportation
In Association With:Intelligent Transportation Committee of China Association of Artificial Intelligence
Editor-in-Chief:ZHONG Ming
Edited and Published by:Editorial Office of Transport Information and Safety
Address:No. 1178,Heping Avenue, Wuchang, Wuhan, CHINA
Postcode:430063
Tel:027-86580355
E-mail:jtjsj@vip.163.com
Website:http://www.jtxa.net/
Postal Code:38-94
Domestic Issue:
CN 42-1781/U
Publication No.:ISSN 1674-4861
- Chinese Core Journal in “Integrated Transportation” category
- Chinese Science Citation Database (CSCD)
- Core Science and Technology Journals
- Chinese Scientific and Technological Papers and Citations (CSTPCD)
- Class A of Research Center for Chinese Science Evaluation (RCCSE)
- Chinese Academic Journal Comprehensive Evaluation Database (CAJ-CED)
- Chinese Core Journals (Selection) Database
- Chinese Scientific and Technological Periodicals Database
- China National Knowledge Infrastructure (CNKI)
- Chinese Academic Journals (CAJ-CD)
- Chinese Lifelong Education Academic Research Database
- Japan Science and Technology Agency (JST)
- World Journal Clout Index Report (2020 STM)
